
村山悟郎《Decoy-walking》2019
「徹底的な混乱」を手懐ける──ズレのある身体としての群れ、あるいは群れとしての身体をめぐって
文_村上久[Hisashi Murakami]、図版_村上久[Hisashi Murakami]、村山悟郎[Goro Murayama]ムンバイ中心部の市街地をリキシャの後部座席に乗って移動したことがある方なら、走行する自動車たちが織り成す、ともすればカオティックとも評したくなるような複雑な道路交通システムに、目眩を覚えた経験があるはずだ。車間距離という概念が存在しないかのような密集度、唐突な車線変更や割り込み、4車線に設定されている道に発生する6車線分の車列。日本人の感覚では事故寸前の混沌の中、現地のドライバーたちはみな涼しい顔のままギリギリで事故を回避していく(もちろん統計的には事故はそれなりに起きてはいる)。一見まるで協調性がないように見えて、しかしこれはこれでひとつのまとまりをなしているらしい。そんな摩訶不思議な光景を前にすれば、おのずと疑問を抱かずにはいられない。
なぜこんなことが可能なのか?
動物の「群れ」の動態を数理モデルによって分析する村上久は、この「なぜ」に対してひとつの有力な回答を提示してくれる。個体がダイナミクスを有する「群れ」となるために欠かせないものとは何か? 群れの外から加えられるゆらぎに耐えられるだけのまとまりではなく、群れの中で発生するゆらぎを群れの必要条件として解したとき、きっと6車線分の混沌に潜む秩序の影が仄見えるだろう。アウトロー組織「公安9課」も、その例外ではない。
「美は乱調にあり」と大杉栄は言う。然るに村上ならこう言うかもしれない。「秩序は混沌にあり」。
目次
村山悟郎《右脳と左脳を入れ替え、自らを見よ。》2019/Photo by Tetsuo Ito
徹底的な混乱
父 木槌の代わりにフラミンゴにすれば、どんなふうに球に当たるか全然予測がつかない。勝手に首が曲がってしまうんだから。 娘 …それに、球が勝手に歩いてっちゃうかもしれない。ハリネズミだから。…ねえ、パパ、みんな生きていないといけないのかしら。そうでないと、あんなにメチャメチャにはならないわよね。 父 いや、…そうだよ。おまえの言う通りだ。…生き物を使わないと、まったく予測不能な世界というのは作れないんだな。 ──グレゴリー・ベイトソン「輪郭はなぜあるのか」『精神の生態学へ』上巻、pp.94-95
「徹底的に混乱した世界」(p.93)を想像するための例として、グレゴリー・ベイトソンは、木槌の代わりにフラミンゴを、球の代わりにハリネズミを用いたクロケット(球技の一種)を挙げている。フラミンゴやハリネズミは、クロケットのプレイヤーの意図を越えて好き勝手なタイミングで動く。プレイヤーと道具それぞれが意思決定するタイミングのズレによって、混乱は生まれる。それぞれ異なる時間を生きているフラミンゴやハリネズミといった生き物を道具として導入することによって、本来的にはプレイヤーの予測可能な技術を競うクロケットは予測不能な世界に変わる。ゲームの質が変わる。
ベイトソンは、人間とフラミンゴ、そしてハリネズミという種の違いにそれぞれが生きる時間のズレを重ねている。しかしこのような時間的ズレは、異種協働クロケットを引き合いに出すまでもなく、同じ種で構成される集団にも日常的に見られる。鳥や魚の群れ全体で共有されているひとつの時計は存在せず、個体の数だけ時間軸はあるだろうからだ。ズレを無数に抱えているにもかかわらず、生き物の群れはあたかもひとつの生き物であるかのように一糸乱れぬ振る舞いを見せる。これが、生命における集団的な組織化の背景にはいつも、徹底的な混乱があるのではないかと問う所以である。
自分の身体であり、かつ自分の身体でない
押井守監督『Ghost in the Shell/攻殻機動隊』に登場する、電脳犯罪を専門的に取り締まる公安9課を率いる全身義体のサイボーグ、草薙素子少佐は言う。「戦闘単位としてどんなに優秀でも同じ規格品で構成されたシステムは、どこかに致命的な欠陥をもつことになるわ。組織も人も特殊化の果てにあるのは緩やかな死。それだけ」。「同じ規格品で構成されたシステム」はどの構成員も同じ時間軸を共有することになるから、集団としては完璧な同期を実現するだろう。だが完璧な同期はシステムに致命的な脆弱性をもたらす。システムが完璧に同期しているが故に、仮にシステム内のある部分にエラーが生じてしまうと、それが瞬時にシステム全体に伝達されることになる。わずかなエラーでも一網打尽になりうる。システムの構成員の時間軸がバラバラで、互いに異質な存在であることに、少佐は積極的な意義を認める。
ここで言う「システム」には、脳以外を全身義体化したサイボーグである少佐の身体、つまり個の身体というシステムも含意されている。規格品から構成される少佐の義体は、生身の人間以上の制御が可能だろう。しかし、規格品ではない脳は完璧な統合を阻み、違和感を伴うズレを内包する。このズレは、「私の身体ではない」という「私」が感じる心身二元論的なアイデンティティの違和感には還元できない。むしろ少佐が感じるズレは、どのスケールのシステムであれ、システムとして機能するためには異質性が必要になるという事実を、よりスケールが小さな個体というシステムのレベルにおいて証言したものではないだろうか。
少佐の身体というひとつのシステムに生じるズレが、身体の完璧な統合を阻み、閉じたひとつの個としての根拠を崩し、少佐を実存的な問題へと向かわせるのかもしれない。だから完全に義体化したサイボーグはこう思ってしまう。「そもそもはじめからあたしなんてものは存在しなかったんじゃないか」、と。だが実存的不安を語る少佐は、(その全体を完全に制御可能な)プールと対比して語られる(決してすべてを見渡すことのできない)海へと、なぜダイブするのかと問われたときには、こうも答える。「恐れ、不安、孤独、闇、そしてもしかしたら希望。海面に浮かび上がるとき今までとは違う自分になれるんじゃないか」。個を閉じたシステムとして確保できない不安と変化に開かれることへの希望は、コインの裏表のように語られる。実際、個が根拠付けられてしまえば、変化は望めないだろう。翻って変化するためには、個は存在の根拠となってはならず、実存的不安を拭い去ることはできない。この個体というシステムにつきまとう両義性は、サイボーグの身体に生じる実存的不安やアイデンティティのズレとも深い関わりがあるだろう。
だが、高度に発達した未来社会を描く《攻殻機動隊》の世界で、脳を除く全身を規格品で義体化したサイボーグだから、個体というシステムに違和が生じるわけではない。というのも自分というシステムに潜む異質さは、生身の人間でも感じるものだからだ。常識的には、「この身体は私のものである」という確信は揺るぎないものとして語られる(身体所有感と呼ばれる)。だがゴムの手錯覚やその全身版である幽体離脱錯覚のように、条件を少しいじるだけで、それまで自明に思えていた身体の統合感覚は容易に変質してしまう*1。さらには、自分の身体であり、かつ自分の身体でない、という両義的な感覚も生身のままで得ることが可能だ。すなわち、頭部装着ディスプレイを通して側面から自己像を観察するとき、視野奥側に位置する腕の肘を自身の胴体で隠しながら動かすだけで、「腕を動かしているのは自分だと感じる(身体操作感)にもかかわらず自分の腕ではないように感じる(非所有感)」ようになるのである*2。機械と有機体が分かち難く接合したサイボーグのほうが、違和感やズレは顕著に現れるかもしれないが、じつのところ、条件さえ整えば同じようなことは生身の人間にもいつでも生じうる。いやむしろ、異質なものを異質なまま受け入れることができるという身体システムの融通無碍が、出生時の身体をあとから人工的に改変する義体化の条件ですらあるのかもしれない。
個体であれ、集団であれ、ズレや違和感をそのシステムの組織化の過程から排除して解消することはできない。では、システムにつきもののズレや違和感は、自然界にあまねく行き渡っている生命システムにおいていかにして手懐けられているのか見てみよう。

村山悟郎《Decoy-walking》2019
動物の群れ
沖縄の砂浜でシュノーケルを装着し、遠浅の海を沖に向かってしばらく泳いでいくと、突然リーフエッジと呼ばれるサンゴ礁の崖が現れる。1メートル程度で続いていた水深が一気に10メートルほどまで深くなり、視界は開け、天気が良い日は海面から海底まで光の柱が立つが、それもエッジから離れるほど弱くなっていく。吸い込まれそうになるその先には、ニライカナイと呼ばれる異界があるとされてきたが、その手前のエッジは、多種多様の魚が交錯しウミガメやウミヘビが往来する、忙しい海の交差点になっている。スクと呼ばれるアイゴの稚魚など、無数の小魚が大きな群れをつくることもある。時には数百から数千の個体からなるその一塊は、磨き抜かれた金属のように艶やかに密であり、展開し収縮しながらサンゴの表面を舐めるように滑らかに進んでいく。だが、大型魚の接近に際したこの群れは、あるときにはまとまりを保ったまま俊敏に旋回し、またあるときには二つに分裂してから瞬時にひとつに戻るという集団行動を繰り返す。このような驚くべき組織化は、陸海空といった生息域や分類群の別を問わず、昆虫やカニ、鳥や哺乳動物まであまねく自然界に見られる。
個々の振る舞いから集団全体としての振る舞いがいかにして生じるかという問いは、部分と全体の関係の問題として古くから考えられてきた。例えば、ムクドリを生涯観察し続けた、19世紀から20世紀初頭の鳥類学者でダーウィン進化論の支持者だったエドモンド・セロースは、数万から成るムクドリの群れの一糸乱れぬ振る舞いは、何らかのかたちで個々の鳥の心が互いに直接接続していて、思考を直接的に伝達できなければ不可能だ、と結論づけたという*3。現代の研究者は、動物の集団的な振る舞いが実現しているのは、テレパシーではなく様々な感覚を総動員しているからだと考えているが、そこまでの進展が得られるには20世紀の終盤まで待つ必要があった。
1987年、人工生命研究者であるクレイグ・レイノルズは、CGアニメーションで群集を再現する目的で、BOID(Bird-oid、鳥もどきの意味)と呼ばれる群れの数理モデルを構築した*4。このモデルの個体は、一定半径の近傍内にいる他個体と相互作用する際に、向きを平均化して揃えようとする「向きの平均化」規則、群れからはぐれまいとする「接近」規則、近すぎる個体と「衝突回避」する規則という三つの規則に従う。簡単な三つの規則を設定するだけで、群れとしてのまとまった動きを計算機上で再現することができるため、BOIDは『バットマン:リターンズ』(1992年)などの映画に登場する群集を動かすアルゴリズムとして実際に採用された。
レイノルズの試み以降、CGアニメーションを離れ生物学的な観点に照らした、BOIDに類似した群れの数理モデルが様々考案されてきたものの、向きの平均化規則はそのほとんどで採用されている。例えば、物理的粒子群に着想を得た統計物理学的観点からつくられたモデルでも、群れをつくるための最低限の規則として向きの平均化規則を採用し、個々の向きをバラつかせる外部からのゆらぎを与えた際の集団的な性質を調べる研究が盛んに行われている*5。向きの平均化規則だけでモデルをつくっても、偶然出会った個体同士が向きを揃え、瞬く間に秩序を備えた巨大な群れを形成する。けれども、これだけでは構成員全員が一方向に流れ続ける、あまりに変化に乏しく柔軟性がない集団となってしまう。そのため、個々の運動の自由度を上げるために、外部から一様にゆらぎを加えるのである。もちろん外部ゆらぎの量が多すぎる場合、個々は散り散りとなり群れとしての体を成さない。結果としてこのモデルでは、外部ゆらぎをパラメータとした、ある値を臨界点とする固相(完全な秩序)から液相(完全なカオス)への相転移現象を構築することになる。実際の生物学的な群れは、ふたつの極のあいだに位置する臨界点において成立していると考えられている。群れとして整っている状態(整列性)を社会性として定義する、BOIDに類する数理モデルの系譜では、集団から独立した個体の自由な運動と、群れ全体にまとまりをもたらす社会性を、互いに対立するベクトルとして前提してきたと言える。
2000年代も終盤になると様々な計算機の性能やトラッキング技術が飛躍的に向上し、自然界の動物の群れを詳細に分析できるようになった。とくに、数千羽からなるムクドリの群れをステレオカメラで撮影し画像解析によって三次元座標を再構成した研究から、従来のBOID系の数理モデルでは説明のつかない現象がいくつも発見された。例えば、個々の鳥の揺動ベクトル(群れ全体の平均飛行速度と個々の飛行速度のズレ)の空間分布を調べたところ、群れ内部で揺動ベクトルの向きが互いに相関し合い、ある種の情報を個体同士が共有する複数の部分領域が見つかった。驚くべきことに、この相関領域の大きさが群れ全体の大きさに線形に比例して大きくなることがわかった。これをスケールフリー相関現象という*6。相互作用の範囲がある一定の局所に留まるなら、群れ全体のサイズが大きくなるに従い情報の共有がなされる相関領域の大きさもどこかで頭打ちになる、と考えるのが妥当のように思える。しかし、現実の群れにおいては、それ自体がひとつの身体をもつかのように、群れ全体のサイズに応じてその内部の相関領域もどこまでも大きくなるのである。BOID系の数理モデルにおける、集団の斉一的な構成を意味する社会性と、外部から一様にもたらされるゆらぎによって起こる個々の自由な運動の対立関係でフィールドに生息する群れのありようを考えてしまうと、向きの平均化規則の場合と同様、個体の飛行速度に対しても外部から一様にゆらぎが加えられると仮定することになる。そうすると揺動ベクトルも外部からもたらされたゆらぎに起因し、群れをカオスに導くランダムな性質を帯びるということになり、個々の揺動ベクトルが群れ内部でつくり出す相関領域の存在を説明できない。相関領域の存在を認める観測事実を説明するには、整列性による社会性と外部ゆらぎによる個々の運動の自由が対立する従来モデルでは困難だ。生態系におけるゆらぎは、群れの内部に由来するからだ。

西表島北部の船浦湾干潟を歩くミナミコメツキガニの群れ/Photo by Hisashi Murakami
ミナミコメツキガニの群れ、アユの群れ
BOID系の数理モデルが孕む限界を越え、相関領域形成のメカニズムを説明する糸口を掴むため、筆者が所属する研究グループは沖縄県西表島のマングローブ林周辺に広がる河口干潟において、数千から数万個体におよぶミナミコメツキガニ*7の群れの調査を行ってきた。その結果、ミナミコメツキガニの群れでは、個々のゆらぎと群れの形成・維持は対立関係にはないことがわかった。カニたちは、集団全体としては粛々と一方向的運動を行いつつ、群れの内部では各個体が活発に位置を入れ替えている様子が観測された。集団の社会性と個の自由は対立してはおらず、同時に併存していることになる*8。
以上の観測結果は、ミナミコメツキガニの群れだけに限らない。一見極めて整列し秩序だった鳥や魚の群れでさえ同様だった。我々は稚アユの群れ*9を分析した*10。まず、実験用水槽にアユの稚魚10〜60匹を放ちその集団的振る舞いをビデオ撮影し、画像解析により個体ごとの運動を追跡した。次に、群れ内部の個体の運動を見るため、群れの中心から見た個々の運動を観察した。この見方は、離れた場所から群れを観察するのでなく、群れとともに観測者が動きながら群れ内部の個々の動きを観察しようとする方法と見ることができる(より正確に言えば、群れの重心基準系において個々の運動を観察したということだ)。結果として、ビデオで見たときには整然と泳いで群れを形成しているように見えた個々の魚は、その運動軌跡を群れの中心から見たときには、群れ内部のそこかしこで重なり合い、互いに激しく位置を入れ替えていることがわかった。さらには観察時間を長めにとると、個々の個体が時には群れの外縁部から一気に反対側の外縁へと移動するほど、群れの内部を縦横無尽に動き回っていることが明らかになった*11。各個体は群れの中で定位置に留まることなく動き回ることで、様々な他個体との相互作用を可能とし、群れ全体を通した滑らかな情報伝達・頑健な群れ形成に貢献していると考えられる。この結果は、ゆらぎの発生源を群れの外部に設定する数理モデルの場合とは異なり、実際の生物の群れにおいては、個々の自由な運動が群れの社会性と対立せず、むしろ積極的に群れ形成・維持に寄与していることを示している。
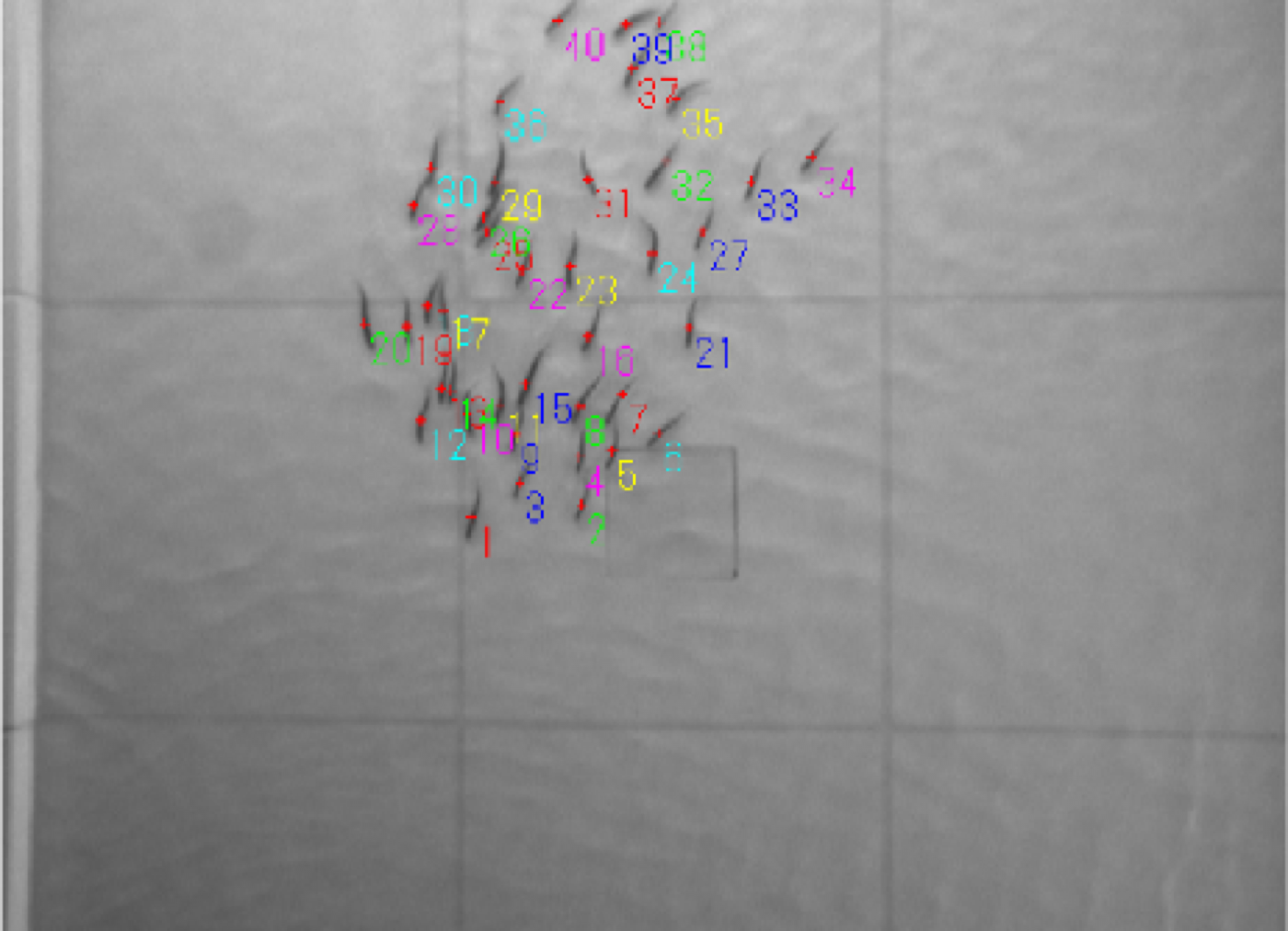
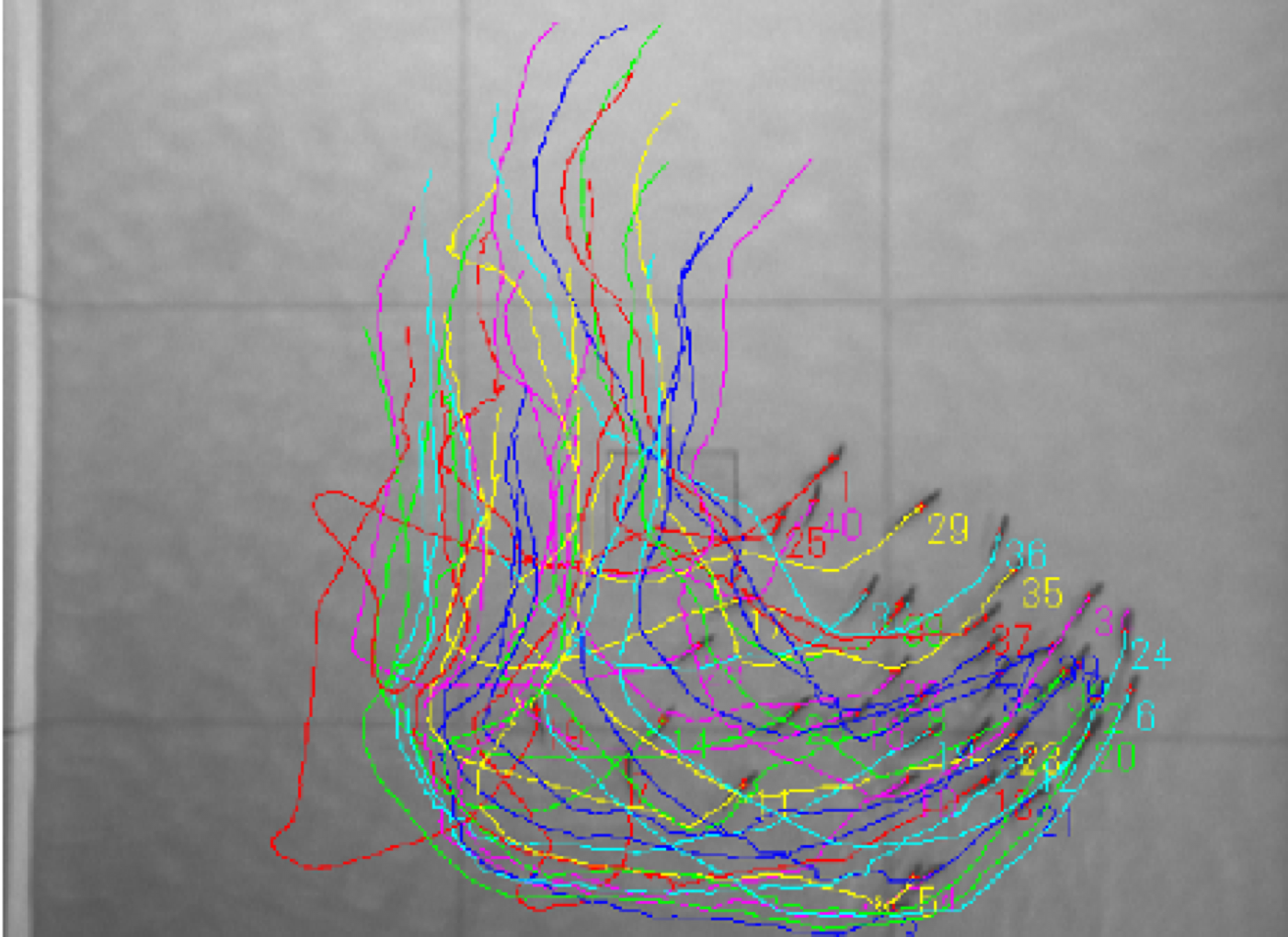
実験水槽内を泳ぐ稚アユの群れのトラッキング/Images by Takayuki Niizato
非同期性と相互予期に基づく群れモデル
これらの観察結果を説明するには、ゆらぎを群れの外部に由来するものと仮定して、向きを平均化して揃えようとする「向きの平均化」を主たる規則とするような、群れ内部の個体が互いに同調することを前提としている従来のモデルでは不十分だ。むしろ、群れ内部の相互作用自体にゆらぎを組み込む方法を考える必要があるだろう。つまり、群れ内部の運動に対してその外側からゆらぎを与えるのではなく、相互作用規則から内的にゆらぎが生じる仕組みが求められている。我々はミナミコメツキガニやアユの群れの観察結果にヒントを得て、新たな数理モデルの構築に取り組んだ*12。鍵となるのは非同期性と相互予期である。
従来、ほとんどの群れのモデルでは、各個体が同期的に位置を更新することを想定してきた。しかし、冒頭のクロケットの例におけるフラミンゴやハリネズミのように、群れを成す多数の個体に、必ずしも同期したタイミングで動ける保証はない。個体を構成する物質レベルでのオブジェクトの運動は共通の時間軸を前提とした物理法則で記述され、そこからの類推で生物の振る舞いの記述も同期的な時間を前提としてきた。しかし群れに関係するのは、物理レベルのオブジェクトの振る舞いではなく、個体間の相互作用であり、各個体の意思決定である。だから、群れの自己組織化を構想するためには、群れ全体の運動タイミングを統御するメカニズムを群れの外部に置くのではなく、群れの内部にいる個体同士の非同期的な位置の更新を追いかけることが肝要になる。
それぞれ異なる時間軸をもつ個体たちがつくり上げる社会性を検討するなら、運動の向きといった空間的な相互作用だけではなく、時間的な調整を含めた個体間の相互作用を考慮しなければならなくなる。そうして生み出された概念が相互予期である。群れの構成員は現時点で行われている運動だけでなく、これから生じる運動の可能性も相互作用の要件に組み入れて、互いの動きを読み合い行動を起こす。
相互予期を行う個体は、複数の異なる向きのベクトルとして表現される、複数の可能な移動先をもち、そのうちひとつを実現する。個体が他個体から孤立しているとき、複数の可能な移動先のうちのひとつがランダムに選ばれることになる。孤立している個体は、不規則な運動を繰り返す。これに対し他個体が近くにいるときには、各個体がこれから向かおうとする移動先は重なりうる。各個体は、この互いの可能な移動先が重なった場所をある種の目的地とし、そこに移動しようとする。ただし、各個体は非同期的に動くため、先行する個体は目的地に移動できるが、後手に回った個体は衝突を避けるためその場所には移動せず、他の可能な移動先へと動く。つまり、非同期的な位置の更新を通して、ある個体において実現される可能性とそれとは別の個体の潜在する(実現されない)可能性が相互作用する。さらに、複数の個体が密集しており個々の可能な移動先が群れの中の至るところで重複しているときには、各個体は多くの目的地をもつことになる。このような状況では、後手に回り特定の目的地に行けなかった個体も、多くの場合、まだ占有されていない他の目的地へ移動することができる。ある個体が移動するときには使われなかった可能な移動先も、この個体より後手に回った他個体の可能な移動先と重なっている限り、その他個体の目的地への移動に寄与しうる。つまり、非同期的な位置の更新を通して、ある個体が実現しなかった可能性と、それとは別の個体がこれから実現しようとする可能性が相互作用する。
群れの内部では各個体が激しく位置を入れ替えている。しかし群れ全体としてはひとつの密な集団を形成し、一方向的に進んでいく。これから向かう移動先が各個体に複数用意されているという事態が群れの内部にゆらぎをもたらす。しかしこの内的ゆらぎは、群れの社会性を脅かすどころか、非同期と相互予期の法則にのっとり、その形成を積極的に助ける。こうして密な群れを維持したまま個々が縦横無尽な移動を展開するのである。
内的ゆらぎと社会性と折り合わせるこのモデルは、他のモデルに比べて、外部摂動に対して頑健であり、スケールフリー相関も示すことから、実際の群れをよく再現する。加えてこのモデルでは、ミナミコメツキガニの群れが見せる渡河行動という創発現象を説明することができる*13。
解体を含意する構築としての群れ形成
鳥や魚に代表されるように、動物の群れは一糸乱れぬ素早い運動を行う。ムクドリの例で見たように、その驚くべき秩序は群れ内部の部分構造にまで及んでいる。だが、一点注意しておくべきは、こうした秩序立った運動はインスタントな時間、つまりその瞬間における個々の位置と運動方向を捉えたスナップショット的な時間において見られたものである、ということだ。他方、アユの例のように、より長い目でみると、個々は群れの内部を自由に縦横無尽に動き回っている。インスタントな時間で確認できる群れの秩序=社会性と、より長時間追うと観測できる個々の運動の多様性と自由。矛盾しているように思えるこの両者の要素をひとつの群れの中で同時に捉えると、群れの構造形成と解体が同時に行われるという徹頭徹尾、動的な群れの描像が浮かび上がる。非同期性と相互予期に基づくモデルの利点は、時間スケールの異なる運動の社会性と多様性を両方とも再現でき、群れの解体を排除せずに群れの構築の背景にある機構を記述できる点にある*14。
では、現実の群れにおいて、相互予期と非同期性がより直接的に集団形成に寄与している事例を検証できないか。群れの動態を内側から観察し分析するだけでは限界があるかもしれない。そこで我々は、ヒトの歩行者の群れを対象に、相互予期と非同期性の観点から介入して条件を変えて比較する実験に着手した。

横断歩道で起きるレーン形成現象に関する実験の様子/Photo by Hisashi Murakami
ヒトの群れ:相互予期への介入
信号が赤から青に変わるとき、それまで横断歩道の両端で待っていた二つの歩行者の集団が互いに向かい合って歩き始め、同じ方向を歩く歩行者はいくつかの列へと自然と分かれていく。全体を指揮する統率者がいないにもかかわらず、個々の歩行者が周囲の歩行者と動きを調整することで、集団全域にわたる秩序が形成される。これをレーン形成現象という*15。レーン形成は一例に過ぎず、他の動物同様歩行者の集団が創発する自己組織化現象も多岐にわたる。
歩行者集団の研究は、他の動物集団の研究と出自を異にするものの、辿ってきた歴史は似ている*16。始まりは計算機を使ったモデル研究だった。物理的粒子群に着想を得て、歩行者が反発の相互作用により衝突回避を行うモデルが古典として定着した。その後、技術的な進展に伴ってだんだん実際の集団を分析できるようになり、古典モデルでは説明できない現象が発見された。その現象のひとつが予期に基づく行動だった。つまり、古典モデルで想定されていた現在の位置ではなく予期される未来の位置に、実際の歩行者の行動は大きく影響を受けるのである*17。
しかし、個々で行っている予期が集団の自律的な秩序形成にいかに関わっているかについては未解明だった。そこで、先に紹介した横断歩道で起きるレーン形成現象に関する実験を54人の被験者とともに行うことにした*18。その際、横断歩道の両端からそれぞれ向かい合い、反対側の端っこへと横断歩行する二つの集団のうち、片側の集団の先頭にいる3人の予期の認知能力に介入するため、彼らには歩行中にスマートフォンを用いて計算問題を解くという追加課題を与えた。彼らの視覚的注意を逸らすためだ。歩きスマホでは歩行者の視野が狭まり周囲への視覚的注意が著しく低下することはよく知られている。そのため、歩きスマホを課された歩行者は、自身の行き先に注意を払えず十分な予期ができなくなるという予測が立つ。画像解析から得た個々の運動軌跡の分析の結果を見ると、誰も追加課題を行わなかった(つまり全員が通常通りに歩いた)場合と比べ、課題を与えられた3人を含む場合は、有意に全体の歩行速度が低下し、レーン形成の開始時間が遅延することがわかった。さらに個体レベルでの分析を進めると、歩きスマホをしていた歩行者だけではなく、きちんと予期が働いているはずの歩行者(歩きスマホをする歩行者に向かっていく者や同じ方向に進む者)まで歩行を乱していたことが明らかになった*19。「一部の歩行者の注意を逸らす」という実験的介入が、注意を逸らされた歩行者の予期能力に直接の影響を与えただけでなく、周囲の歩行者にも間接的に影響を与えていたのである。逆に言えば、一方的に行動を予期されるだけの個体がいると、群集の中で協調的に歩行するのは難しい。予期は双方向で行われる必要がある。
予期をめぐる介入実験を経て、通常の歩行者集団では、個々の歩行者が互いに相手の動きを読み合うことによって集団としての秩序化を促進させていることがわかった。もちろん群れの現象の解明には程遠く、むしろこの実験によって浮き彫りになった、具体的な感覚入力などに関する新たな問題も数多い。それでも、相互予期が群れ形成の機構のひとつとして適切であるということは、裏付けることできた。
ヒトの群れ:非同期性への介入
非同期性が集団形成に与える影響にも実験で介入を試みた。成果は、当初の意図から外れた方向から得られた。歩行者集団における歩行ステップの同期の有無を調べようとした実験において、むしろ非同期性の集団形成における重要性が明らかになったのである。
これまで見てきたレーン形成現象のような空間的パターン形成に加えて、歩行者の集団には時間的なパターン形成も生じる。それが、歩行ステップの同期である。たとえば、参加者にドーナツ型の実験通路に沿って一列縦隊の円環をつくらせ同じ方向にぐるぐる歩いてもらうという実験では*20、ある密度において歩行者のステップが同期する現象が見られた*21。歩行者は前を行く人と同じ側の足を同時に出すことでぶつからないようにし、狭いスペースを有効活用している、というのである。この研究結果に従えば、ステップの同期現象は空間リソース使用の最適化戦略ということになるだろう。だが、路上を行く歩行者集団は、実験装置に制限されることなくより自由に動いて、空間的な自己組織化を行う。ステップ同期の空間リソース仮説は状況が異なっても通用するだろうか。
そこで、レーン形成現象を対象とする実験でステップ同期の空間リソース仮説を検証した*22。横断歩道の両端に二つの集団が向かい合って立ち、そこから反対側の端に向かってそれぞれ歩いていくという設定はそのままに、観察方法としては、画像解析による軌跡取得と合わせて、ステップの同期を計測するために、歩行者の両足にそれぞれ小さな加速度センサーを装着してもらうという工夫を加えた。そのうえで、歩行に条件をつけた場合とつけない場合とを比較した。前者では、歩行者の平均的な歩行テンポを聴覚的に再現する電子メトロノーム音を常時スピーカーから流し、それに合わせて歩行してもらうという条件をつける。後者では、その条件を外し音のガイドがない状態で通常通りに歩いてもらう。
同期に関する介入実験の結果、歩行者は外的な聴覚キューが与えられない限り、自発的にはステップを同期させないことがわかった。さらに、外的キューによって生じた歩行の同期は、とりわけ歩行者の横方向の動きの多様性を損なわせ、運動を単調なものとし、形成される空間構造を脆弱にすることが明らかになった。外的に同期させられた集団は細い列を多くつくる。このような状況では、歩く方向の異なる列の接触面が多くなるため、わずかな外乱により構造は大きく乱されることになる。これに対し、音のガイドのない通常の歩行者集団は頑健だが、足並みを揃えることはない。ステップ同期の空間リソース仮説で群れの運動がうまく立ちゆくための前提となっていたのは同期の実現だったが、この介入実験の結果から、集団形成の頑健性への寄与を評価するにはむしろ非同期的な運動に注目しなければならないことになる。たとえば、一見協調的な振る舞いをしているように見える現象でも、同じ場所に行こうとする二人の運動のタイミングのズレが、一方の動きを他方が調整し別の方向に向かう時間を与えることによってそうなっているのかもしれない。さらなる詳細な分析が必要ではあるが、いずれにせよ、集団全体に先立って生じる個々の運動はそもそも非同期的なのであり、その非同期性が個々の運動の自由さと多様性を生み出し集団の頑健性に貢献していると考えたほうが群れの問題の核心に迫れるだろう。
ゆらぐ群れ
学術運動家/野良研究者の逆卷しとねは、あらかじめ世界に対する超越的な立場を確保してから世界を名詞によって同定するのではなく、手近な動詞を手がかりにして、どこまでも開かれ変転する、自らが内在している世界の生成に参加するよう促す*23。逆卷の言う名詞と動詞の関係は、複雑系科学における安定性(stability)と頑健性(robustness)の関係に似ているかもしれない*24。システムの安定性の記述では、オリジナルな状態の維持が基準となる。つまりこの場合、システムにはあらかじめ戻るべき状態が設定されていて、外的なゆらぎに影響を受けたとしても元の状態に戻って来られるかどうかを問うことになる。他方、システムの頑健性の記述では、基準となるオリジナルの状態を想定しない。頑健性は組織化されたものとダイナミクスの相互作用に関係する。より踏み込んだ言い方をすれば、安定性の記述ではシステムの構造形成とゆらぎは対立するものであるのに対し、頑健性の記述ではゆらぎはむしろ構造形成に積極的に関わってくる*25。
ここまで概観してきたように、戻るべき状態をもたない群れを安定なシステムとして記述することはできない。むしろ群れは、内在的にゆらぎを生成し、それが群れ形成に積極的に関わる頑健なシステムだと考えられる。頑健なシステムの場合、ゆらぎの発生を内的なものか外的なものか区別することはできない。内外の区別がつかない開かれたシステムだからこそ、群れは絶えず変化しながらも極めて壊れにくいシステムを実現する。だからこそ、閉じたシステムとして定義することを徹底的に拒む、ゆらぎに貫かれた群れを、絶えず生成し続ける開かれたシステムとして考察することが求められるのである。
村山悟郎《Decoy-walking》2019
「自分が自分であるためには驚くほど多くのものが必要なの」
先日ある学会に参加したときのことだ。学会会場の廊下でばったり会った知り合いとそのまま話し込んでいた。しばらく経つと、相手が「しまった! 聞きたい発表があったんだった」と足早に去っていった。あるいは、同じ学会の午前の講演終了後に鉢合わせた別の知り合いと昼食をとりにいった帰り道に、二人して歩きながら話し込んでいた。気がつくといつの間にか次の講演会場の入り口に辿り着いている。すでに講演が始まっているその会場の中に、二人とも話すのをやめて、スッと入っていく。
あまり学会に参加することもなく知り合いが多いとも決して言えない私だが、思い返してみると、途中で立ち消えになった会話の切れ端をいつもかき集めてまわっているような気がしてくる。このような経験が澱のように積もり積もっていき、あるとき何かしらの刺激を受けてかたちを得て立ち上がり、私にひらめきを与える、というような出来すぎたことが起こったことはなさそうだ。それでも断ち切られた会話の一断面は、知らず知らずのうちに他の断面と接続を果たしている、ような気もする。
同じ学会で私は、シオマネキというカニ*26が自身の巣穴の位置に関して二通りの記憶をもつことを示す、2023年夏に西表島で得た成果について発表した。そのときデータを総合して提示した二つの記憶は、オブジェクトレベルの記憶(巣穴の位置記憶それ自体)と、記憶の確信度を評価するメタレベルの記憶としてまとめ直すこともできるかもしれない。動物のメタ認知を問うとき、多くの場合、動物の生態と関連が乏しい記号を覚えさせ、覚えた記号を他の記号の中から選ばせる。正解すると良い餌がもらえ、不正解だと餌はもらえない。また、選択自体を回避する別の記号も用意されている。選択を回避する選択をした場合には、正解した場合より質は劣るものの、とにかく餌はもらえる。このような実験設定において、記憶の確信度が低いときに、動物は適切に選択を回避することができるかが問われることになる。このテストをパスするかどうかで、動物が「人間のような」メタ認知をもっているかどうかを判定することになる。しかしメタ認知の有無を判定するというテストの形式上、あるところまでの動物はメタ認知をもち、それ以外はもたない、とするような切断が必須となる。つまり進化の途上で、あるとき突然、ある種の動物だけがメタ認知を始めたということになってしまうのである。しかし、それでメタ認知の起源を問うたことになるのだろうか。メタ認知の出来する現場に立ち会うためには、動物の身体を含む生態学的コンテクストを踏まえた実験をしなければならないのではないか。それが私の発表のテーマだった。
ベイトソンは、学習を枠づける文脈が指定できない限り、学習はうまくいかないと指摘する*27。学習によって強化されるものごとのもつ意味が文脈次第で異なることがありうるからだ。同じことは記憶についても言える。そもそも文脈を枠付け、その確信度を評価するメタ認知がなければ記憶は使いようがないし、確信度に応じて記憶の使い方は変わりうるからだ。記憶の文脈に対する確信度の評価は、社会的な相互作用をきっかけにして変わることもある。例えばある記憶が、それとは直接関係しない他者との社会的相互作用のせいで不確実になったとする。そのとき、もともとの記憶が確かかどうか推定する際の文脈となるのは、その記憶を不確かなものに変えた、他者との相互作用そのものである(推定された記憶と実際の記憶の精度は必ずしも一致しないことに注意されたい。両者のあいだに齟齬をきたす「錯覚」がありうる)。
ベイトソンがすでに指摘しているように、文脈は、文脈の文脈(例えば社会的相互作用を存立させる、他者とのそもそもの社会的関係)、さらには文脈の文脈の文脈(社会的関係を存立させる、日々の環境変化に依存して変わる空間的位置関係)等々を伴い、窺い知れない彼方へとどこまでも広がっていく。文脈を指定するメタ認知を、孤立した自己言及システムとして前提する傾向は根強い。だが実際のメタ認知はそれが働く文脈から切り離すことはできない。そう思い直すときメタ認知は、その生態系さえ巻き込んだ、事前には想定できない外部に展開する文脈からの支えでかろうじて立ち上がる、徹底した動性を潜在させたシステムとして再定義することができる。
生態系さえ巻き込み外部にどこまでも広がる文脈から切り離すことのできない、開かれた性格を有するのは、自己意識も同じだろう。『Ghost in the Shell/攻殻機動隊』の結末において、少佐は人形使いと融合する。そのとき、少佐が抱える、自己の輪郭をめぐる実存的な不安は、ネットの海全体を認識できる、ある種の超越性を備えた人形使いとの融合をもって解消したように私には見えてしまう。たしかに、少佐の「私が私でいられる保証は?」という問いかけに対し、人形使いは「その保証はない」と答え、それを受けての融合ではある。それに続く「人は絶えず変化するものだ」という人形使いの言葉も、その通りではある。なるほど、融合後も「変化」は担保されてはいるようだ。ただし、ここでの「変化」は、輪郭をもった確固たる主体が、望んだものを、望んだままに取り込んでいき、膨張していくようなある種の成長でしかないのではないか。それは変化とはいっても、つねに基準となる状態がその都度担保される、あくまで安定な存在の変化だ。他方で、これとは異なる変化がありうる。つまり、システムが確固たる状態をもたず、ゆらぎにまみれており、絶えずズレが付きまとうがゆえに、外部との関わりの中で想定外に「変化してしまう」頑健な変化がありうるはずだ。このような変化が見逃されているように思えてならない。だからこそ私は、融合後の最後の場面で、ゆらぐことなく前を見据え、もはや一抹の不安さえ感じさせることなく、広大なネットへと旅立とうとする少佐=人形使いの姿に、取り残されたようなさびしさを覚えるのである。
[註]*1
例えば、テーブルの上にゴム製の左手を置き、その左側に被験者の本物の左手を置き、両者のあいだについ立てを挟み、被験者にはゴムの手は見えるが自分の手は見えない状況をつくる。その状態のまま、ゴムの手と本物の手に触覚刺激を同時に与える(被験者はこのあいだゴムの手を見るよう指示される)。すると、被験者はゴムの手が本物の手であるように感じられる(ゴムの手に所有感が転移する)。この錯覚は視覚と触覚の同期によって起こると考えられている。
Matthew Botvinick, Jonathan Cohen, “Rubber hands ‘feel’ touch that eyes see.” Nature, vol. 391, 1998: 756.なお、この説明に合致しない実験結果も報告されている。
Marieke Rohde, Massimiliano Di Luca, Marc O. Ernst, “The rubber hand illusion: feeling of ownership and proprioceptive drift do not go hand in hand.” PLoS ONE, 6(6), 2011: e21659.ゴムの手錯覚を全身に拡張したものとして、幽体離脱錯覚がある。
Bigna Lenggenhager, Tej Tadi, Thomas Metzinger, Olaf Blanke, “Video ergo sum: manipulating bodily self-consciousness.” Science, 317(5841), 2007: 1096-1099.*2
Yuta Nishiyama, Chihiro Yamashita, Shusaku Nomura, “An illusion of disownership over one’s own limb is associated with pain perception.” Scientific Reports, 13(1), 2023: 2801.*3
Iain Couzin, “Collective minds.” Nature, 445, 2007: 715.*4
Craig W. Reynolds, “Flocks, herds and schools: A distributed behavioral model.” Proceedings of the 14th annual conference on Computer graphics and interactive techniques, August 1987: 25-34.
Tamás Vicsek, András Czirók, Eshel Ben-Jacob, Inon Cohen, and Ofer Shochet*5
Tamás Vicsek, András Czirók, Eshel Ben-Jacob, Inon Cohen, and Ofer Shochet, “Novel type of phase transition in a system of self-driven particles.” Physical review letters, 75(6),1995: 1226.その他の群れモデルについては以下に詳しい。
Hisashi Murakami, Masato S. Abe, Yuta Nishiyama, “Toward Comparative Collective Behavior to Discover Fundamental Mechanisms Underlying Behavior in Human Crowds and Nonhuman Animal Groups.” Journal of Robotics and Mechatronics, 35(4), 2023: 922-930.*6
Andrea Cavagna, Alessio Cimarelli, Irene Giardina, Giorgio Parisi, Raffaele Santagati, Fabio Stefanini, Massimiliano Viale, “Scale-free correlations in starling flocks.” Proceedings of the National Academy of Sciences, 107(26), 2010: 11865-11870.*7
琉球列島の河口干潟に生息する日本固有種。カニとしては珍しく、横歩きでなく前に向かって歩く(最新の研究から、もともと前歩きだったものが一旦横歩きに進化し、またさらに前歩きに先祖返りしたと考えられている; 谷口隼也・井上翼・黃榮富・平井厚志・水元惟暁・竹下文雄・河端雄毅「カニの移動方向はどう進化したのか?: 現生種情報を用いた祖先形質の復元」日本動物行動学会第42回大会)。ミナミコメツキガニは、大規模な群れをつくり粛々と行進していく姿からの類推で、兵隊ガニとも呼ばれる。成体の甲羅の大きさはビー玉より少し大きい程度で、その色は夏場にはおそらく厳しい太陽の光を和らげるために黒っぽくなるが、冬場の繁殖期が近づくにつれ鮮やかな青色に変わるため(Masaki Jinno, Wataru Doi, Akira Mizutani, Hiroyoshi Kohno, “Seasonal changes in body color of Mictyris guinotae (Brachyura: Mictyridae).” Crustacean Research, 49, 2020: 133-140)、青い宝石と呼ばれることもある。危険を感じるとその場に素早く穴を掘って隠れるが、しばらくすると陸続と地表に出てきて群れ始める。*8
Hisashi Murakami, Takenori Tomaru, Takayuki Niizato, Yuta Nishiyama, Toru Moriyama, Yukio-Pegio Gunji, “Emergent runaway into an avoidance area in a swarm of soldier crabs.” PLoS ONE, 9(5), 2014: e97870; Hisashi Murakami, Takenori Tomaru, Takayuki Niizato, Yuta Nishiyama, Kohei Sonoda, Toru Moriyama, Yukio-Pegio Gunji, “Collective behavior of soldier crab swarm in both ring-and round-shaped arenas.” Artificial Life and Robotics, 20, 2015: 315-319.*9
「友釣り」で知られるように、アユは成体になると縄張りをもち互いに排他的行動をとるが、幼体では大きな群れを成し、イワシの群れのような典型的な集団行動をとる。*10
この研究は、以下の筑波大学新里高行助教との共同責任著者論文にまとめられている。
Hisashi Murakami, Takayuki Niizato, Takenori Tomaru, Yuta Nishiyama & Yukio-Pegio Gunji, “Inherent noise appears as a Lévy walk in fish schools.” Scientific reports, 5(1), 2015: 10605.*11
この群れの内部運動は、特定のスケールをもたない(その分布はベキ則に従う)、多くの短いステップからなるクラスターを稀に生じる長いステップが接続する、レヴィ歩行と呼ばれる運動パターンをもつことがわかった。この運動から、各個体は近くにいる他個体との相互作用を活用(exploitation)しつつ、絶えず新たな他個体との相互作用を探索(exploration)していると考えられる。なおレヴィ歩行は、さまざまな生物の探索行動に見られる運動戦略であり、予測が困難な仕方で分布したリソースの探索効率を最適化することで知られている。近年では、探索戦略以外の行動の柔軟性といった機能的利点も明らかになっている(Masato S. Abe, “Functional advantages of Lévy walks emerging near a critical point.” Proceedings of the National Academy of Sciences of the United States of America, 117(39), 2020: 24336-24344)。*12
私の博士論文指導教官である郡司ぺギオ幸夫神戸大学教授(現早稲田大学教授)のもと行われた研究。
Yukio-Pegio Gunji, Hisashi Murakami, Takayuki Niizato, Andrew Adamatzky, Yuta Nishiyama, Koichiro Enomoto, Masashi Toda, Toru Moriyama, Tetsuya Matsui, Kojiro Iizuka, “Embodied swarming based on back propagation through time shows water-crossing, hourglass and logic-gate behaviors.” In ECAL 2011: The 11th European Conference on Artificial Life. MIT press, 2011; Hisashi Murakami, Takayuki Niizato, Yukio-Pegio Gunji, “A model of scale-free proportion based on mutual anticipation.” International Journal of Artificial Life Research (IJALR), 3(1), 2012: 34-44; Hisashi Murakami, Takayuki Niizato, Yukio-Pegio Gunji, “Emergence of a coherent and cohesive swarm based on mutual anticipation.” Scientific reports, 7(1), 2017: 46447.*13
相互予期と非同期性に基づくモデルを採ると、予期が集合的に行われると考えるため、一個体での行動では認められないが群れとして実現している挙動を記述できるようになる。その一例がミナミコメツキガニの渡河行動だ。ミナミコメツキガニは干潮になると砂泥から現れ、干潟を歩き回るが、干潟にある川や池には決して一個体では入ろうとしない。しかし、集団が大きくなり個体密度が極度に高くなると、突然水域に侵入して一気に川や池を渡っていく。この創発現象は、通常のモデルでは説明が困難だが、相互作用モデルでは簡単に再現できる。先述のように、このモデルでは各個体が向かうことのできる移動先が重複するとそこが群れの目的地となるが、ここでは水域を特別な場所と定め、可能な移動先が通常よりも多く重複しないと群れの目的地とはならない場所と定義する。その結果、少数個体集団では移動先の重複が不十分なため水域に侵入することはできないが、より大きな群れになると水際で高密度な集団を形成し、より多くの移動先の重複が起こり、群れとして水域に侵入できるようになる。*14
とくにTakayuki Niizato, Hisashi Murakami, Takuya Musha, “Functional duality in group criticality via ambiguous interactions.” PLOS Computational Biology, 19(2), 2023: e1010869.*15
Hisashi Murakami, Claudio Feliciani, Katsuhiro Nishinari, “Lévy walk process in self-organization of pedestrian crowds.” Journal of The Royal Society Interface, 16(153), 2019: 20180939ではレーン形成中の歩行者がレヴィ歩行に似た振る舞いをすることを示している。*16
歩行者集団研究の歴史については、前掲H. Murakami, M. S. Abe, Y. Nishiyama, 2023にまとめられている。*17
古典モデルでは、極を同じくする二つの磁石の関係のように、二人の歩行者はその距離が近ければ近いほど強く反発し、遠ければとりたてて力は働かないと考えられていた。このように、古典モデルが重視したのは、現時点での位置関係だった。しかし様々な形態の通路や歩道を歩く歩行者行動の分析により、歩行者の行動は現在の位置ではなく、予期される未来の位置に大きく影響を受けることが明らかになった。当然のことではあるが、雑踏を歩く二人の歩行者の距離が離れていたとしても、互いに向かい合って歩いているならば、いずれぶつかることは容易に見通すことができる。このような場合はあらかじめ互いに避けようとする。また、二人の距離がかなり近かったとしても、同じ方向に歩いているなら当分ぶつかる心配はない。このような場合、回避行動は生じないのである。*18
Hisashi Murakami, Claudio Feliciani, Yuta Nishiyama, Katsuhiro Nishinari, “Mutual anticipation can contribute to self-organization in human crowds.” Science Advances, 7(12), 2021: eabe7758.*19
自身の行き先に注意を払い予期を行う歩行者は、対向する歩行者が十分離れていても衝突回避などの行動を見せるが、注意を逸らさざるをえない制約を与えられた歩行者は予期が困難になるため、ぎりぎりで急に大きなターンをして回避することが予想できる。実際、急で大きなターンを行う頻度を調べたところ、予期への介入があった条件の場合により多く見られた。しかし特筆すべきことに、大きなターンによる回避はスマホ歩きを課された歩行者のみならず、それ以外の歩行者にも確認された。*20
このような実験設定は、歩行者間相互作用のミニマムな形態(つまり前後に並んだ二人のやりとり)と密度などの要素との関係を調べる方法として幅広く使われている。この設定は他にも、車の渋滞現象を調べる実験に使われており、セルオートマトン等のモデルでも簡単に記述できるという利点がある。例えば、西成活裕『渋滞学』(新潮社、2006年)を参照。*21
Yi Ma, Eric Wai Ming Lee, Meng Shi, Richard Kwok Kit Yuen, “Spontaneous synchronization of motion in pedestrian crowds of different densities.” Nature human behaviour, 5(4), 2021: 447-457.*22
この研究は、以下の同僚の都丸武宜博士との共同責任著者論文にまとめられている。
Takenori Tomaru, Yuta Nishiyama, Claudio Feliciani, Hisashi Murakami, “Robust spatial self-organization in crowds of asynchronous pedestrians.” bioRxiv, 2023-08.(査読前プレプリント)*23
逆卷しとね「VerbFeS manifesto」2023*24
Erica Jen, “Stable or robust? What’s the difference?” Complexity, 8(3), 2003: 12–18.*25
Yukio-Pegio Gunji, Hisashi Murakami, Takayuki Niizato, Yuta Nishiyama, Takenori Tomaru, Andrew Adamatzky, “Robust swarm model based on mutual anticipation: Swarm as a mobile network analyzed by rough set lattice.” International Journal of Artificial Life Research (IJALR), 3(1), 2012: 45-58.*26
私が参加している研究チームが研究対象としているのは、オキナワハクセンシオマネキである。シオマネキの仲間は、オスのみが片方の鉗脚かんきゃく=ハサミを自身の甲羅と同程度に巨大化させるという、極端な性的二型をとる。この種は、その巨大な鉗脚を用いて多様な社会行動(求愛行動や縄張り争い)を行うことで知られている。シオマネキという名前も、この鉗脚を振る「ウェービング」と呼ばれる求愛行動が、潮を招いているように見えることに由来するとされる。なお、標準的な英名はFiddler crabである(Fiddlerはバイオリン奏者)。このカニは、採餌さいじのために小さい方の鉗脚を使って地表の砂泥を頻繁に口へと運ぶ際の動きが、バイオリン(大きいほうの鉗脚)を弓で弾く動きに似ているため、その名がついたとされる。英名では、細かくは見ているが、環境との関わりは度外視されており、人間に似た振る舞いを充てただけとも解釈できる。命名としては和名に軍配を上げざるをえないだろう。同種は、極めて優れた空間認知能力をもつことでも知られる。
Hisashi Murakami, Takenori Tomaru, Yukio-Pegio Gunji, “Exclusive shift from path integration to visual cues during the rapid escape run of fiddler crabs.” Animal Behaviour, 144, 2018: 147-152; Hisashi Murakami, Takenori Tomaru, Yukio-Pegio Gunji, “Interaction between path integration and visual orientation during the homing run of fiddler crabs.” Royal Society open science, 4(9), 2017: 170954.*27
グレゴリー・ベイトソン『精神の生態学へ(中)』佐藤良明訳、岩波文庫、2023年、p.174、p.205、pp. 274-275
むらかみ・ひさし/1987年生まれ、大阪府出身。神戸大学理学部で生命論研究者の郡司幸夫教授の研究室に入ったことをきっかけに動物の群れの研究に取り組む。同大学大学院博士課程後期課程修了後、早稲田大学研究員、神奈川大学特別助教、東京大学特任助教を経て2021年1月から京都工芸繊維大学助教。長岡技術科学大学の西山雄大准教授、東京大学のフェリシャーニ・クラウディオ特任准教授、西成活裕教授との共同研究で、2021年9月にイグ・ノーベル賞(動力学賞)を受賞。